


據(jù)艾瑞咨詢《2025 商用具身智能白皮書》數(shù)據(jù)顯示,2025 年全球具身智能市場規(guī)模已達?192 億元人民幣,未來五年復(fù)合增長率預(yù)計高達?73%,十年內(nèi)將形成萬億級市場體量。在國家 “十五五” 規(guī)劃重點布局與地方政策密集扶持下,國內(nèi)具身智能產(chǎn)業(yè)加速突圍,頭部企業(yè)已實現(xiàn)十億元級營收突破,人形機器人正從技術(shù)驗證階段邁入規(guī)模化量產(chǎn)的關(guān)鍵窗口期。
當前,人形機器人產(chǎn)業(yè)化進程仍受限于感知、決策、執(zhí)行全鏈路的技術(shù)瓶頸,核心部件可靠性、場景適配性、測試驗證效率等問題成為制約落地的關(guān)鍵。
虹科基于供應(yīng)鏈核心資源整合,構(gòu)建覆蓋?“感知 – 思考 – 行動”?的具身智能全棧測試解決方案,針對性破解行業(yè)核心痛點,為產(chǎn)業(yè)化落地提供技術(shù)支撐。
感知層:
高可靠時空感知體系,破解 “環(huán)境交互精度不足” 難題
行業(yè)痛點
三維感知在復(fù)雜場景下魯棒性不足,實時三維重建精度難以滿足工業(yè)級需求;
戶外作業(yè)時空定位依賴外場測試,存在成本高、周期長、場景覆蓋不全等問題,制約 “感知 – 決策” 閉環(huán)形成。
解決方案預(yù)告
- 深度視覺賦能:依托友思特 Stereolabs ZED 雙目相機(GMSL/USB 雙接口形態(tài)),解析主流深度成像技術(shù)原理,攻克動態(tài)場景三維重建、復(fù)雜光照適應(yīng)性等核心難題,搭配開源工具鏈實現(xiàn)軟硬件協(xié)同開發(fā),已在工業(yè)自動化、移動機器人等場景形成成熟落地案例。
用圖-1-1024x563.jpg)

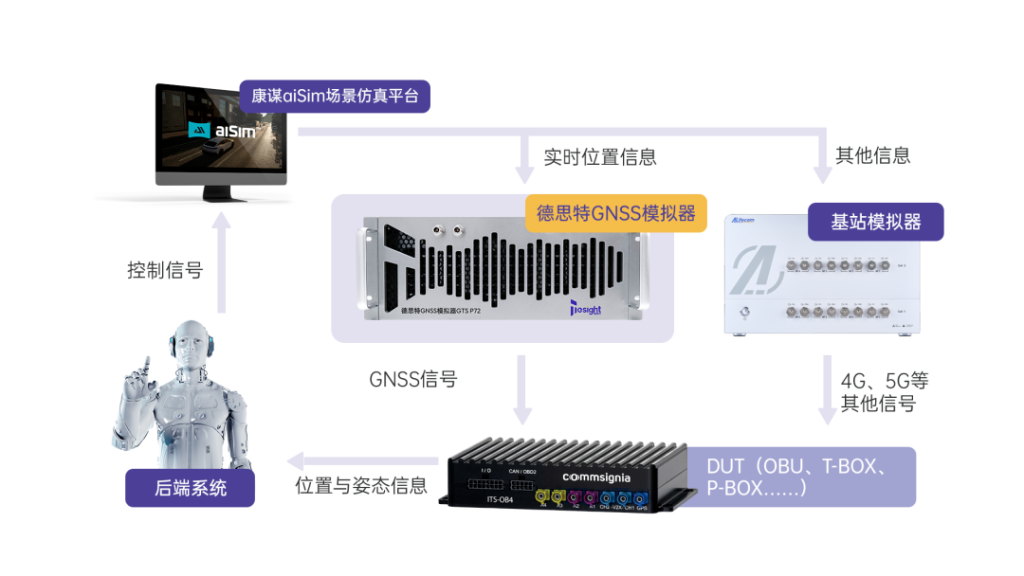
- 定位仿真驗證:為滿足具身智能戶外作業(yè)對高可靠時空感知的迫切需求,本方案以德思特GNSS模擬器為核心,建硬件在環(huán)(HIL)測試環(huán)境,將戶外全域作業(yè)場景的定位驗證轉(zhuǎn)移至實驗室,通過在實驗室高保真復(fù)現(xiàn)多場景、多路徑的全球衛(wèi)星導(dǎo)航信號,實現(xiàn)對機器人定位模塊的精準注入與閉環(huán)驗證,完成對機器人高可靠時空感知的精準測試,為具身智能戶外作業(yè)的定位穩(wěn)定性提供全場景覆蓋支撐。
思考層:
實時智能協(xié)同架構(gòu),突破 “決策執(zhí)行效率瓶頸”
行業(yè)痛點
多軸精密運動控制依賴專用控制卡,導(dǎo)致系統(tǒng)成本高、擴展性差;
機器人內(nèi)部通信存在延遲與兼容性問題,關(guān)節(jié)線纜束縛影響機械設(shè)計靈活性;
Sim2Real 遷移不穩(wěn)定,虛擬仿真與物理世界存在適配鴻溝。
解決方案預(yù)告
- 實時通信與控制賦能:CAN FD憑借其高傳輸速率、大載荷容量、高可靠性及低布線成本優(yōu)勢,適用于人形機器人靈巧手的毫米級運動控制、毫牛級力控反饋等對實時性與精度要求極高的任務(wù)。基于CAN FD技術(shù),虹科提供的多路CAN FD總線工作站、虹科PCAN-Explorer 6定制化軟件平臺為機器人領(lǐng)域中高速指令下發(fā)、多傳感器數(shù)據(jù)回傳及全鏈路測試提供高效技術(shù)支持與一體化解決方案。

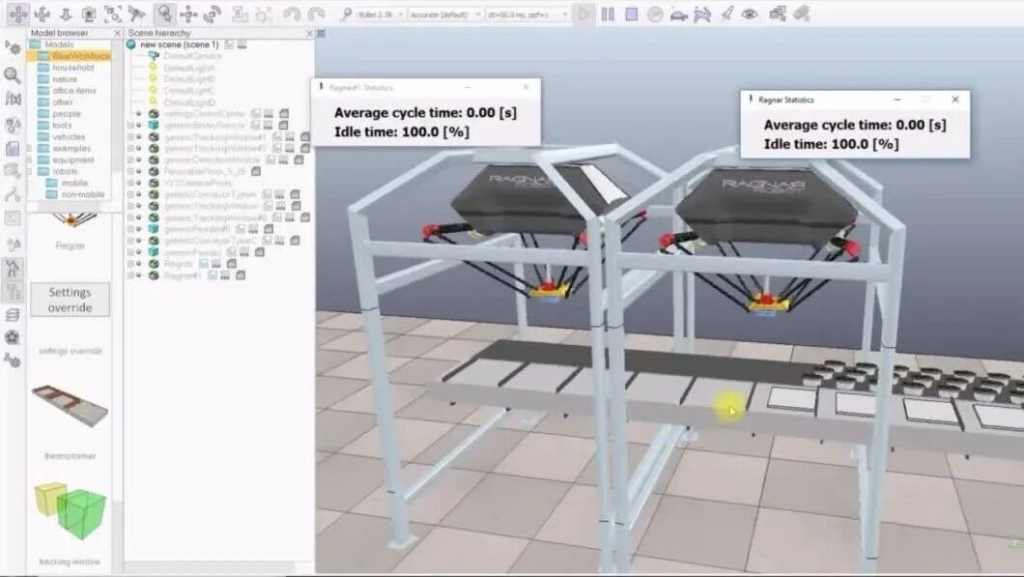
數(shù)字孿生驗證:搭建機器人運動控制數(shù)字孿生平臺,實現(xiàn)虛擬環(huán)境下的無限次測試迭代,優(yōu)化運動控制算法參數(shù),縮小 Sim2Real 遷移差距,提升技術(shù)落地效率。
行動層:
高精度執(zhí)行控制方案,補齊 “物理交互能力短板”
行業(yè)痛點
執(zhí)行器集成度低、力控精度不足,難以滿足仿生手、靈巧手的精細操作需求;
動作控制響應(yīng)滯后,穩(wěn)定性與動態(tài)適配性無法匹配復(fù)雜工業(yè)場景,制約人機協(xié)同與物理世界交互質(zhì)量。
解決方案預(yù)告
- 精密執(zhí)行器部署:采用宏集 IR Robot 小型線性伺服執(zhí)行器,憑借高集成度、高精度特性,實現(xiàn)仿生手、靈巧手的精準抓取力控與復(fù)雜動作復(fù)刻,完美適配人機協(xié)同場景下的精細操作需求。

- 模塊化控制支撐:搭配?Berghof 模塊化控制器,基于?CODESYS 軟件開發(fā)平臺,構(gòu)建高效的本地控制架構(gòu),實現(xiàn)傳感器信息實時處理與運動控制算法快速執(zhí)行,保障動作響應(yīng)的穩(wěn)定性與迅捷性,充當機器人 “動作控制小腦”。

專題直播
2026.3
為深度解析全棧測試方案的技術(shù)細節(jié)與落地實踐,虹科將于2026年3月舉辦 “具身智能供應(yīng)鏈全棧測試解決方案” 專題直播。
屆時行業(yè)技術(shù)專家將圍繞核心技術(shù)原理、產(chǎn)品適配邏輯、場景落地案例展開深度分享,助力企業(yè)精準把握產(chǎn)業(yè)化機遇。

直播報名鏈接
https://i80ld.xetlk.com/sl/4WglL

?? 填寫下方網(wǎng)址【內(nèi)容收集問卷】,
獲取更多直播專屬福利!

qcn3fz2jwn3r.feishu.cn
參與問卷填寫福利如下:
積分抽獎:瓜分300積分,直播當天來直播間兌獎;100積分=50元京東E卡;
領(lǐng)取方式:中獎后截圖添加助教,直播當天在直播間兌換
參與人群:通過鏈接進入直播間觀看直播,且直播間注冊的信息真實無誤
此外,我們也希望更多行業(yè)內(nèi)的技術(shù)專家、行業(yè)洞察員、前沿技術(shù)愛好者……成為虹科線上直播嘉賓,向行業(yè)同仁分享您的技術(shù)干貨與項目洞察。
您將收獲有競爭力的專家報酬和「虹科金牌技術(shù)講師」認證,在賦能他人的同時,夯實自己的專業(yè)地位。
本次直播同樣開放自薦通道,要求與報酬如下:
??? 專業(yè)背景
從事人形機器人、具身智能、工業(yè)自動化等領(lǐng)域技術(shù)研發(fā) / 項目落地≥2 年;
熟悉感知(視覺 / 定位)、決策(實時系統(tǒng) / 通信)、執(zhí)行(執(zhí)行器 / 控制)任一模塊的技術(shù)原理與實踐經(jīng)驗。
??? 能力要求
能輸出「技術(shù)干貨 + 場景案例」結(jié)合的直播內(nèi)容,邏輯清晰、表達專業(yè);
對行業(yè)趨勢有獨立洞察,可分享落地痛點、解決方案或項目經(jīng)驗。
?? 身份適配
- 企業(yè)技術(shù)專家、行業(yè)觀察員、前沿技術(shù)愛好者等,不限職業(yè)身份,只要有優(yōu)質(zhì)內(nèi)容。
歡迎通過以下任一方式聯(lián)系我們:
郵箱投遞
將您的投遞內(nèi)容發(fā)送至:
yang.wenqi@hkaco.com
郵件主題請使用:直播講師申請-您的姓名-公司(郵件中請注明聯(lián)系電話)
便捷咨詢
掃碼添加虹科工作人員微信(備注:投稿/講師報名+姓名),快速交流相關(guān)事宜。
掃碼咨詢
須知:我們將在收到投稿/報名后的5個工作日內(nèi)給予審核反饋。對于符合要求的案例,虹科團隊將主動對接后續(xù)事宜。
我們深信,每一次技術(shù)實踐都蘊含著推動行業(yè)前進的力量。無論您是分享一個精巧的應(yīng)用案例,還是成為傳遞知識的技術(shù)講師,都是在與技術(shù)社區(qū)共同成長。立即行動,讓我們攜手推動技術(shù)創(chuàng)新與知識共享。
關(guān)注 @虹科電子科技有限公司 官方賬號
后續(xù)將同步完整議程、嘉賓陣容及技術(shù)干貨
敬請期待!

封面-768x327.png)
區(qū)企業(yè)上市和新三板發(fā)展促進會-768x356.png)






英.png)